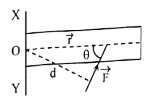
τ⃗=r⃗×F⃗\vec{\tau}=\vec{r} \times \vec{F}τ=r×F
τ=d×F\tau=d \times Fτ=d×F
τ=r⃗⋅F⃗sinθ\tau=\vec{r} \cdot \vec{F} \sin \thetaτ=r⋅Fsinθ
τ=d⃗Fsinθ\tau=\vec{d} F \sin \thetaτ=dFsinθ